前言:介绍一些基础常用的知识。
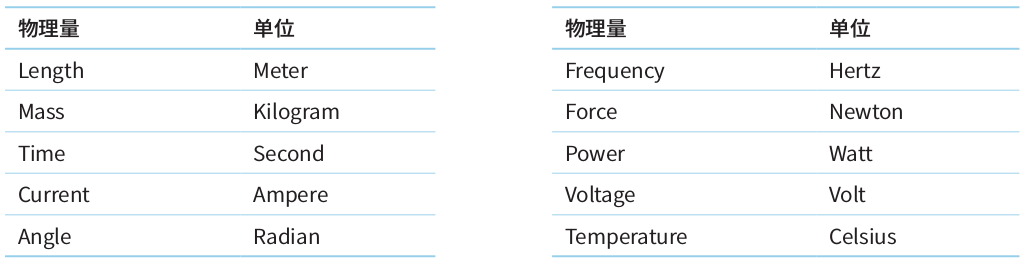
一、标准单位
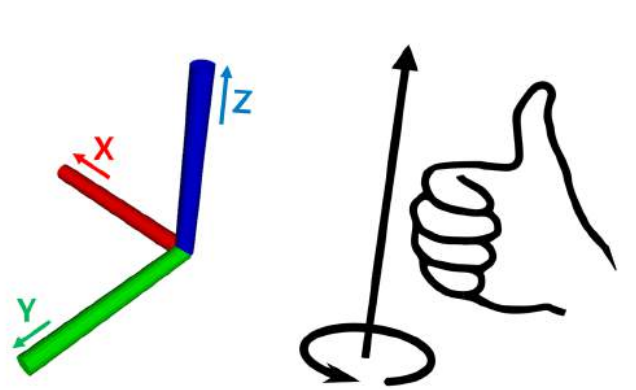
二、坐标表现方式
三、默认安装位置
通过apt-get安装的软件包, 默认安装位置为:/opt/ros/kinetic/share
四、软件包安装流程
4.1 二进制安装(第一种方法)
如果想安装ROS功能包,可以用下面的apt-cache命令搜索以ros-kinetic开头的所有的功能包。利用这个命令可以搜索到大约1600多个功能包
apt-cache search ros-kinetic
使用以下命令安装软件包
sudo apt-get install ros-kinetic-[功能包名称]
4.2 源码编译(第二种方法)
更新软件库
sudo apt update
低于16.04版本的ubuntu输入:
sudo apt-get update
安装依赖
sudo apt-get install -y google-mock libboost-all-dev
注:红色部分替换为自己需要安装的依赖,两个以上的依赖中间用空格隔开。
安装软件包
cd到需要编译的位置git网址编译
五、如何修改带有权限的文件
sudo gedit [文件名] 或 chmod +x 【文件名】
六、.py文件
.py文件一般会有权限,导致出现找不到软件包的错误提示;
这时需要cd到软件包目录,然后运行chmod +x [文件名]
赋予权限即可.
-END-